Credit: JAXA / Takara Tomy / Sony Group / Doshisha Univ
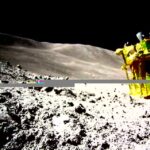
Een foto die gemaakt is door de bolvormige robot genaamd LEV-2 (Lunar Excursion Vehicle-2) laat het duidelijk zien: de Japanse maanlander Smart Lander for Investigating Moon (SLIM), die op 19 januari op de maan landde, is op z’n kant terechtgekomen. De kleine LEV-1 en LEV-2 robotrovers waren nog vóór de landing losgemaakt van de hoofdlander en goed terechtgekomen. En zo kon LEV-2, die ook wel SORA-Q wordt genoemd, van een afstandje kijken naar SLIM. Hieronder zie je een vergelijking tussen hoe SLIM terechtkwam en hoe ‘ie terecht had moeten komen, met de twee motoren aan de zijkant.

Credit: JAXA
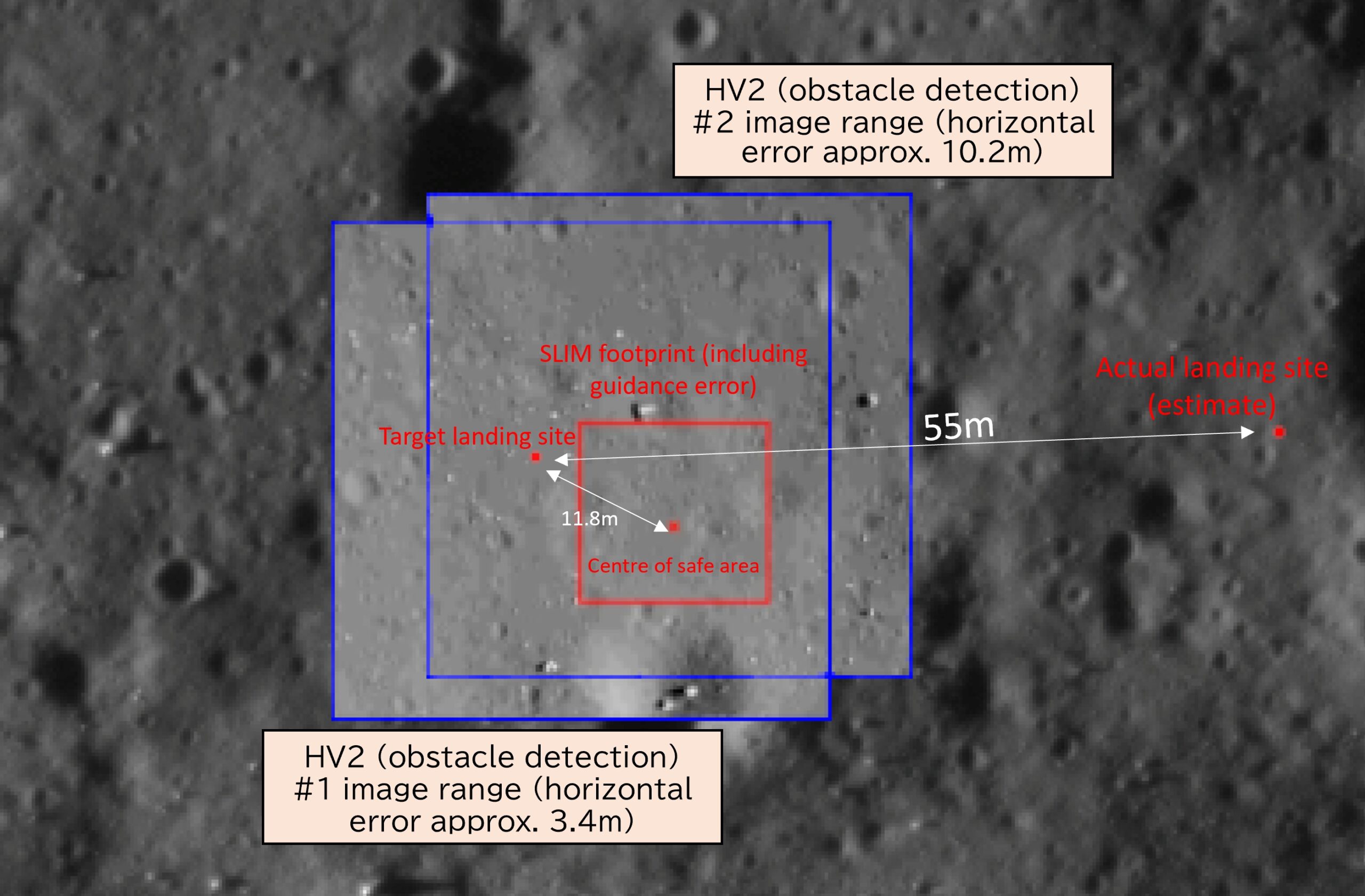
Wat de landingsplek betreft was de lander precies goed terechtgekomen, want hij kwam slechts 55 meter van het exacte doel terecht waarop gemikt was. Maar tijdens de afdaling moet er iets gebeurd zijn waardoor de stuwmotoren boven kwamen te liggen en de zonnepanelen aan de westkant. SLIM heeft twee stuwmotoren, die de lander tijdens de afdaling gebruikte om af te remmen en naar de beoogde landingsplek te gaan. Maar één van de twee lijkt niet goed te hebben gefunctioneerd en toen ging de andere motor daarvoor compenseren en maakte de lander op het laatst een hoek van 90 graden om vervolgens te landen.
Credit: JAXA.
Hadden beide motoren goed gewerkt dan was SLIM slechts 12 meter van het doel geland, vlakbij de Shioli krater. Dat blijkt uit opnames die gemaakt zijn van SLIM door de Indiase maansonde Chandrayaan-2, die een baan om de maan beschrijft. Technici van JAXA blijven hopen dat als de zon steeds meer in westelijke richting komt de zonnepanelen nog wat licht opvangen en de accu’s kunnen laden. Dat moet dan wel gebeuren vóór donderdag 1 februari, want dan gaat de zon onder op de lokatie van SLIM en begint de maannacht, die twee weken lang duurt. SLIM is niet gebouwd om zo’n maannacht te overleven. Bron: o.a. Universe Today.